Содержание
Одновременная локализация и картирование (SLAM), вероятно, не та фраза, которую вы используете каждый день. Тем не менее, некоторые из последних крутых технологических чудес используют этот процесс каждую миллисекунду своей жизни.
Что такое SLAM? Зачем нам это нужно? А о каких классных технологиях ты говоришь?
От аббревиатуры к абстрактной идее
Вот быстрая игра для вас. Какой из них не принадлежит?
- Самостоятельные автомобили
- Приложения дополненной реальности
- Автономные воздушные и подводные аппараты
- Носки смешанной реальности
- Roomba
Вы можете подумать, что ответ — последний элемент в списке. В некотором смысле, вы правы. По-другому, это была хитрая игра, так как все эти предметы связаны между собой.
 Изображение предоставлено: Натан Кролл / Flickr
Изображение предоставлено: Натан Кролл / Flickr
Настоящий вопрос (очень крутой) игры заключается в следующем: что делает все эти технологии осуществимыми? Ответ: одновременная локализация и картирование или SLAM! как говорят крутые дети.
В общем смысле цель алгоритмов SLAM достаточно проста для повторения. Робот будет использовать одновременную локализацию и картирование для оценки своего положения и ориентации (или позы) в пространстве при создании карты своего окружения. Это позволяет роботу определить, где он находится и как перемещаться в неизвестном пространстве.
Следовательно, да, то есть все, что делает этот причудливый алгоритм, — это оценка положения. Еще одна популярная технология, Глобальная система позиционирования (или GPS)
оценивает положение со времен первой войны в Персидском заливе 1990-х годов.
Различие между SLAM и GPS
Тогда зачем нужен новый алгоритм? GPS имеет две присущие проблемы. Во-первых, в то время как GPS точен относительно глобального масштаба, точность и точность уменьшают масштаб относительно комнаты, стола или небольшого пересечения. GPS имеет точность до метра, но какой сантиметр? Миллиметр?
Во-вторых, GPS не очень хорошо работает под водой. Под не хорошо я имею в виду совсем нет. Аналогичным образом производительность внутри зданий с толстыми бетонными стенами невелика. Или в подвалах. Вы поняли идею. GPS — это спутниковая система, которая страдает физическими ограничениями.
Таким образом, алгоритмы SLAM нацелены на то, чтобы дать лучшее представление о наших самых совершенных гаджетах и машинах.
Эти устройства уже имеют множество датчиков и периферийных устройств. Алгоритмы SLAM используют данные из максимально возможного числа из них с использованием некоторой математики и статистики.
Цыпленок или Яйцо? Положение или Карта?
Математика и статистика необходимы, чтобы ответить на сложный вопрос: используется ли позиция для создания карты окрестностей или карта окрестностей используется для расчета местоположения?
Мысль время эксперимента! Вы межпространственно искривлены в незнакомом месте. Что ты делаешь первым? Паника? Хорошо, хорошо успокойся, сделай вдох. Возьми другой. Теперь, что вы делаете вторым? Оглянись вокруг и попробуй найти что-нибудь знакомое. Стул слева от вас. Растение справа от вас. Журнальный столик перед вами.
Затем, как только исчезает парализующий страх «Где, черт возьми, я?», Вы начинаете двигаться. Подождите, как работает движение в этом измерении? Сделай шаг вперед. Стул и завод становятся меньше, а стол становится больше. Теперь вы можете подтвердить, что действительно движетесь вперед.
Наблюдения являются ключом к повышению точности оценки SLAM. На видео ниже, когда робот перемещается от маркера к маркеру, он создает лучшую карту окружающей среды.
Вернуться в другое измерение, чем больше вы гуляете, тем больше вы ориентируетесь. Шаг во всех направлениях подтверждает, что движение в этом измерении похоже на ваше домашнее измерение. Когда вы идете направо, растение вырисовывается больше. Полезно, что вы видите другие вещи, которые вы определяете как ориентиры в этом новом мире, которые позволяют вам бродить более уверенно.
По сути, это процесс SLAM.
Входы в процесс
Чтобы сделать эти оценки, алгоритмы используют несколько частей данных, которые могут быть классифицированы как внутренние или внешние. Для вашего межмерного транспортного примера (допустим, у вас была веселая поездка), внутренние измерения — это размер шагов и направление.
Внешние измерения сделаны в виде изображений. Выявление таких ориентиров, как растение, стул и стол, является легкой задачей для глаз и мозга. Самый мощный из известных процессоров — человеческий мозг — способен снимать эти изображения и не только идентифицировать объекты, но и оценивать расстояние до этого объекта.
К сожалению (или к счастью, в зависимости от вашего страха перед SkyNet), у роботов нет человеческого мозга в качестве процессора. Машины полагаются на кремниевые чипы с человеческим написанным кодом как мозг.
Другие части машин делают внешние измерения. Периферийные устройства, такие как гироскопы или другие инерционные единицы измерения (IMU), помогают в этом. Роботы, такие как автомобили с автоматическим управлением, также используют одометрию положения колеса в качестве внутреннего измерения.
 Кредит изображения: Дженнифер Морроу / Flickr
Кредит изображения: Дженнифер Морроу / Flickr
Внешне автомобиль с водителем и другие роботы используют LIDAR. Подобно тому, как радар использует радиоволны, LIDAR измеряет импульсы отраженного света для определения расстояния. Используемый свет обычно ультрафиолетовый или ближний инфракрасный, аналогичный инфракрасному датчику глубины.
LIDAR отправляет десятки тысяч импульсов в секунду, чтобы создать трехмерную карту облаков точек с очень высоким разрешением. Так что, да, в следующий раз, когда Тесла будет кататься на автопилоте, он застрелит вас лазером. Много времени.
Кроме того, алгоритмы SLAM используют статические изображения и методы компьютерного зрения в качестве внешнего измерения. Это делается с помощью одной камеры, но может быть еще более точным с помощью стереопары.
Внутри черного ящика
Внутренние измерения обновят оценочную позицию, которая может быть использована для обновления внешней карты. Внешние измерения обновят оценочную карту, которая может быть использована для обновления положения. Вы можете думать об этом как о проблеме вывода, и идея состоит в том, чтобы найти оптимальное решение.
Обычный способ сделать это через вероятность. Такие методы, как фильтр частиц, приближенное положение и отображение с использованием байесовского статистического вывода.
Фильтр частиц использует заданное количество частиц, распределенных по гауссовскому распределению. Каждая частица «предсказывает» текущее положение робота. Вероятность присваивается каждой частице. Все частицы начинаются с одинаковой вероятностью.
Когда выполняются измерения, которые подтверждают друг друга (например, шаг вперед = увеличение таблицы), тогда частицы, которые являются «правильными» в своем положении, постепенно получают лучшие вероятности. Частицам, которые находятся далеко, присваиваются более низкие вероятности.
Чем больше ориентиров может опознать робот, тем лучше. Ориентиры обеспечивают обратную связь с алгоритмом и позволяют проводить более точные вычисления.
Современные приложения, использующие алгоритмы SLAM
Давайте разберем этот, крутой образец технологии с помощью отличного элемента.
Автономные подводные аппараты (AUV)
Беспилотные подводные лодки могут работать автономно с использованием методов SLAM. Внутренний IMU предоставляет данные об ускорении и движении в трех направлениях. Кроме того, для оценки глубины AUV используется гидролокатор, обращенный снизу. Гидролокатор бокового обзора создает изображения морского дна, с расстояния в пару сотен метров.
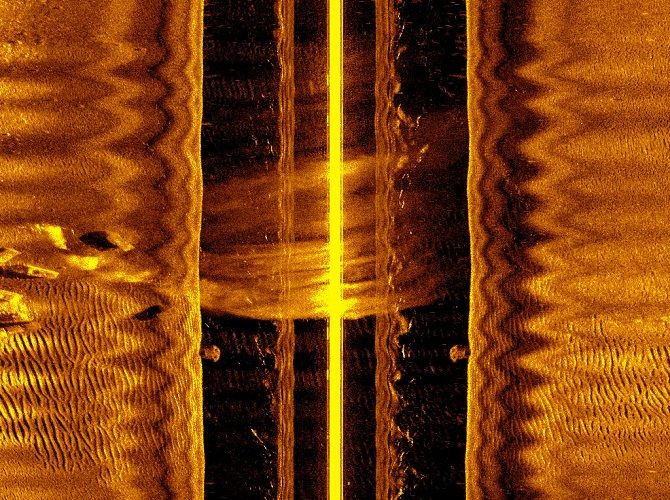 Кредит Фотографии: Флоридский Морской Грант / Flickr
Кредит Фотографии: Флоридский Морской Грант / Flickr
Носки смешанной реальности
Microsoft и Magic Leap выпустили носимые очки, которые представляют приложения смешанной реальности
, Оценка положения и создание карты имеет решающее значение для этих носимых. Устройства используют карту, чтобы размещать виртуальные объекты поверх реальных и взаимодействовать друг с другом.
Поскольку эти носимые устройства являются небольшими, они не могут использовать большие периферийные устройства, такие как LIDAR или гидролокатор. Вместо этого для картирования окружающей среды используются меньшие инфракрасные датчики глубины и внешние камеры.
Самостоятельные автомобили
Автономные машины имеют небольшое преимущество перед носимыми. С гораздо большими физическими размерами автомобили могут содержать большие компьютеры и иметь больше периферийных устройств для внутренних и внешних измерений. Во многих отношениях автомобили с самостоятельным вождением представляют будущее технологий, как с точки зрения программного, так и аппаратного обеспечения.
Технология SLAM совершенствуется
С технологией SLAM, используемой несколькими различными способами, это только вопрос времени, когда она будет усовершенствована. Когда ежедневные автомобили с самостоятельным вождением (и другие транспортные средства) будут замечены, вы поймете, что одновременная локализация и картография доступны для использования всеми.
Технология самостоятельного вождения совершенствуется с каждым днем. Хотите узнать больше? Ознакомьтесь с подробной разбивкой MakeUseOf о том, как работают автомобили без водителя.
,
Кредит изображения: chesky_w / Depositphotos




![Объясненный беспроводной алфавитный суп: что такое 4G, 3G, LTE и многое другое [MakeUseOf Explains]](https://helpexe.ru/wp-content/cache/thumb/01/43ee99584f0ee01_150x95.jpg)